作者:胡迪·利普森 梅尔芭·库曼 评分:*** 短评:因为跳槽而想了解的行业,作为入门书很好,一方面可以解答很多普通大众对于自动驾驶的疑惑点,另一方面也简单介绍了自动驾驶涉及的软硬件传感器等入门知识。看完之后还是很看好无人驾驶的未来的,毕竟是小学作文中对于未来设想的重要场景之一。
以下笔记部分个人向纪录
为什么无人驾驶还未普及
如果只是简单地编辑程序让四个轮子的机器人遵守道路交通规则,那么无人驾驶在几十年前就早已普及了。汽车为什么直到现在才有可能变得智能自动化呢?
1. 第一是现实因素,也就是它的门槛很高。
人命关天,错误成本很高,有些类似滴滴,安全要求非常高。所以目前都是在容错率高的区域尝试:运载矿石,农业收割机,工厂物流,机场固定路线
这也就解释了为什么今天的第一批自动驾驶车辆会先在人烟稀少的地方使用,因为车辆如果在这种地方出问题、偏离既定的路线,所造成的人员伤亡是最小的。例如,在偏僻的澳大利亚北部矿石公司使用巨大的自动化驾驶卡车来运载矿石;农民使用自动驾驶的拖拉机、联合收割机在广袤而无人的农地里耕作;在配送中心和工厂里,专门的自动化车辆会将货物从房间的一侧运到另一侧;在度假村或机场,名为纳维亚的无人驾驶穿梭车会以既定每小时15英里的速度沿着固定路线往返运送乘客……
2. 第二个难点及关键点就是纯粹的技术问题
虽然在99%的时间里,驾驶过程都是思维僵化而且可预测的,但是仍有1%的时间里会产生突发事件。生物有机体会依赖所谓的“本能(Simple)”来应对生活中突发的未知事件。是“本能”,使人类可以在交通的高峰时段自由驾驶,也正是“本能”,蕴含了人类智能中尤为难以复制的大量能力。
深度学习软件通过观察世界来“学习”,这一点赋予了它另一巨大优势——不依赖规则(not rule-bound)
3. 事实上,制约无人驾驶广泛普及的最主要人为因素是政府的监督与管理措施
理想情况下,政府的最高层应该制定前瞻性策略,而不是被动响应。例如,法律专家应该重新检视责任法,以明确当无人驾驶造成事故时,谁应该承担什么样的责任。
无人驾驶的安全性
以此类比出租车的死亡率和网约车的死亡率对比。
关于汽车,有一个奇妙的讽刺,虽然汽车自从发明以来已经“谋害了”数百万人的生命,但我们的社会对于它造成的死亡人数仍视而不见,这或许是一种冷漠的默许。每年,全世界都有将近120万人死于车祸,谋杀、自杀以及战争每年预计会造成160万人死亡,由毒品导致的死亡人数每年约有18.3万人。
伊诺运输中心(Eno Center for Transportation)的研究曾作出预测,如果路面上的汽车能有90%变成自动化驾驶的,单单在美国,就可以将一年里死于车祸的人数从32,400人减少到11,300人。
无人驾驶的7个误区
- 自动化驾驶技术会脱胎于当今的驾驶员辅助技术。
实际上,这种分阶段操控不仅存在技术难题,而且还是不安全的。研究发现,当人类和机器共享方向盘的操控权时,如果要求人类在紧急状态下突然掌握方向盘,他们反而会无法胜任,表现为注意力无法集中。 完全自动化驾驶所需的技术并不是当今驾驶员辅助技术的派生,而是有着独立的技术发展路径。
我就认识到优秀管理的核心原则之一,就是不要将一个关键性任务分给两个人去做,这是一种被称为“责任分散(SplitResponsibility)”的典型管理失误。谷歌公司报告中,我们已经看到了人类的本性,这也是典型的责任分散,或者工程师将其称为“自动化偏见(Automation Bias)”:一旦看到技术有效,人们就会很快地信任技术。结果就是,当人们被鼓励交出驾驶权去享受放松时,他们很难再投入到驾驶任务中了。
- 技术的进步是线性推进的。
- 公众会抵制无人驾驶。
- 无人驾驶的发展需要在基础设施上进行大量投资。
实际上,引导无人驾驶软件的只是清晰的道路标志线,除此以外,无人驾驶并不需要什么特殊的基础设施建设。
- 无人驾驶会造成道德困境。
- 无人驾驶汽车需要有近乎完美的驾驶记录才能确保足够安全。
只要无人驾驶汽车的安全驾驶记录超出人类驾驶员的平均水平,它们就能造福人类
- 无人驾驶汽车的应用将会突然大量爆发
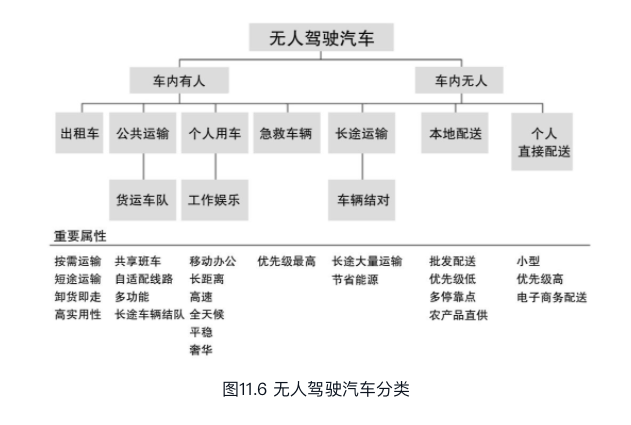
其实,无人驾驶汽车的应用是逐步发展的。自动化的汽车会首先应用于一些限定的区域,比如度假区、大学校园,以及封闭性的市中心区域。在公共道路上,无人驾驶的“入侵”是逐步化的,随着由人类驾驶的汽车逐渐退役,无人驾驶汽车的应用比率每年也只会增长几个百分点。
无人驾驶技术发展的时间表
即使人们可以直接购买一辆经过充分测试并合法认证的自动化汽车,但由于现在汽车的平均寿命是10~15年,所以想要将所有老式的、人类驾驶的汽车撤离道路仍需大约20年的时间。
汽车厂商做无人驾驶
让汽车公司高管惶恐不安的一个风险因素,就在于未来车辆的“硬件”——汽车的金属框架(底盘)、引擎以及内部装潢等,都必须优先服务于计算机硬件的布置,并且彻底沦为汽车软件的附庸。如果在消费者眼里,汽车的软件系统成为了最具区分意义的挑选特征,汽车公司将失去汽车市场的掌控权。
未来的理想态是廉价的公共交通取代购买汽车(robotaxi)
无人驾驶汽车给汽车行业带来了未知和不确定性。过去一个世纪以来,将汽车直接卖给消费者是个效益不错的生意。然而,如果无人驾驶汽车使消费者更愿意为每次出行单独付费,而不再购买自己的专属汽车,那么也很难再把这些普通的非智能汽车卖给出租无人驾驶汽车的运输公司。如果某一天汽车公司不得不与软件公司建立合作关系来制造无人驾驶汽车,那么这种结合的结果就是汽车公司只能从最终的销售利益中分一小部分。
无人驾驶系统
底层控制系统:加速、刹车和转向
预测算法通常基于底层控制,以确保机器人行进过程中的流畅性。预测算法可以提升汽车的情境识别能力,方法就是始终留意数字地图的变化,以便精准计算引擎的燃料注入量,使得汽车可以顺畅、平稳地翻山越岭。有些燃料喷射系统会利用多个不同传感器的数据流,并考虑到多种额外因素,如发动机负荷、空气湿度以及周遭环境的氧气水平,最终计算得出刚好适量的注入燃料以实现发动机的恒速运行。
想要实现汽油发动机的稳定运行,所需应对的重大难题之一就是时间延迟,或者称为“滞后时间(Lag time)”。对于一个发动机或者一个系统而言,时间滞后看似是无关紧要的小问题,但能影响反馈控制设备的运行,即使是最好的设备也不例外。因为给汽油发动机注入燃料的过程,究其核心还是一个机械的、化学的(非电子的)活动,所以因为时间滞后问题产生的难以预料的情况,使无人驾驶汽车的汽油发动机备受关注。这种时间滞后就意味着汽车的启动、加速以及停止都难以实现精准的时间控制。
不过,至少有两种方式可以减少时间滞后问题对自动驾驶汽车的影响:一种方式是在底层控制中投入更多的计算能力。计算能力强大的电脑可以减弱燃油喷射器所带来的延迟问题,并为汽油发动机的匀速运行和精准计时提供更高的准确度,最终达到较高的平衡状态;解决问题的第二种方式就是更换发动机。电动式引擎更加容易管理调节,这也是谷歌公司和特斯拉公司不约而同为其原型无人驾驶汽车配置电动引擎的原因之一。只要为电动引擎配置好特定的电压电位,引擎就始终能即时产生对应程度的力矩,推动汽车前进。很遗憾,几十年来大批才智超群的人将他们的智慧用于解决汽油发动机的调节控制问题,因为一旦全电动式引擎应用于无人驾驶汽车,那么那些丰富的智慧成果将变得毫无价值可言。
上层控制系统:路径规划和道路导航
只负责汽车基本运转的底层控制也许可以很快地完成任务,但上层控制系统的工作时间则要长得多,有时可能在整个出行的过程里都需要运行。如果将底层控制系统比喻为“条件反射活动”,那么上层控制系统就类似于“高级心智活动”,即传统上而言的“脑力活动”。上层控制系统的基础是路径规划和导航,而两者都需要通过搜索算法(Search Algorithms)的应用来实现。
正如我们前文提到的,无人驾驶汽车相比其他移动版机器人的一大优势就在于它们是建立在四个轮子上的,无须借助躯干肢体运动。事实上也是如此,由于汽车可以滚动前进,无人驾驶汽车的设计师可以回避类似CHIMP等灾难恢复机器人在自动化过程中所遇到的大量计算难题。
中层控制系统 —— 人工识别
应该如何称呼这些不能完全归属于底层控制或者上层控制领域的各种新兴软件工具包。思考一番之后,我们索性将这些软件归属到名为“中层控制(MidlevelControls)”的领域。 对于为汽车提供人工识别和智能反应的各种软件工具,我们用“中层控制软件”这个短语来指代。中层控制软件使得汽车的操作系统能识别传感器数据,感知车辆周围环境的实体布局,并针对周围事物或事件做出最佳反应方案。
简单理解?首先是一个现实世界的数据化,然后进行物体识别,之后进行预测周围物体的运行轨迹,最后基于预测内容规划路线
我们将通过四个组成模块来解释中层控制系统的工作原理:第一个模块是占据栅格的软件工具;第二个模块是一个软件程序,用于识别并标记流入占据栅格的原始数据;第三个模块使用预测性的人工智能软件对障碍物用不确定性锥(Cones of Uncertainty)做替代;最后,第四个模块由一个短期轨迹规划器(Short-term Trajectory Planner)组成,负责引导汽车绕过感知到的障碍,同时保证遵守相应的交通规则。
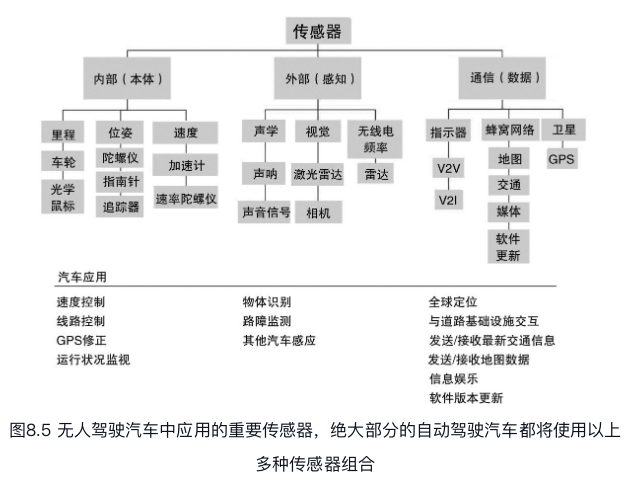
无人驾驶硬件
- 高精地图
- 数码相片
- 激光雷达(light detection and ranging)
今天的无人驾驶汽车既使用数码相机,也使用激光雷达。在几十年前人工智能发展滞后的年代,激光雷达就已经是必不可少的视觉传感器了。如今的激光雷达传感器虽然造价仍旧高昂,且比起数码相机要慢半拍,然而它产生的点云却能为车辆规划绝大多数环境中的路线,并指引其完成驾驶。 长期阻碍数码相机成为机器视觉传感器的“瓶颈”是三维感知。而且解压、处理大量像素需要强大的计算能力支持,在实时操作中计算能力却往往跟不上——这是数码相机在无人驾驶应用上的严重缺陷
马斯克—我认为人们无须使用激光雷达,无源光(passive optical)外加前置雷达就能做到这一切。事实上,即使没有激光雷达也能彻底解决问题。我不看好激光雷达,它在这种情况下不起作用。
- 无线电检测与测距(雷达)
除了激光雷达和数码相机,无人驾驶汽车还使用普通雷达(Radar)来识别周围环境。数码相机在像素网格里捕捉场景,激光雷达传感器则类似一罐“数码喷漆”,让原本无形的物体披上“数字化外衣”。然而雷达传感器的工作方式就像往池塘里扔下一块小石子,追随水面漾起的圈圈涟漪跳跃的方向。 对于自动驾驶来说,雷达传感器最大的好处是可以穿透浓雾、暴雨、尘土、扬沙,甚至是强烈的顶灯灯光,这一点不同于数码相机。雷达传感器还有一个优点,它不仅能检测到物体的位置,还能根据多普勒效应监测到物体的速度。 相反地,雷达传感器最大的缺点就是其分辨率相对较低。
- 超声波传感器(声呐)
如果把激光雷达和数码相机比作一个人的眼睛,超声波传感器就是人的耳朵。超声传感器可谓雷达的近亲——像雷达一样,发射波形信号,检测回波——不过超声波传感器发射的是超声波,不同于雷达的电磁波。
- 线控技术(Drive by Wire)
在以前,工程师把普通汽车改装成为无人驾驶汽车,是通过装配特制的机械“线控”装置,目的是取代人类司机的手和脚。这些新装置叫作线性致动器(Actuators),通过它们可以控制方向盘,踩下刹车。生产出准确、稳定的机械驱动器是工程学的难题,其过程的复杂不亚于创造出人工智能来指引汽车。
- 其他设备
新兴科技特点
以下是零原则的工作原理。撼动传统行业的新兴科技都有一个共同特点:产品推出后,一项或多项生产工作的成本将降到几乎为零。实际上,遵循零原则的技术推出几年后,产生了极大的行业影响,最终成为行业革命的导火索。
-
接近零伤害。
-
接近零技术。
-
接近零耗时。
-
接近零尺寸。
缩写词
- 自适应巡航控制(adaptive cruise control,ACC)
- 车道保持辅助系统(lane keepingassist system,LKAS)
- 车对车通信系统(vehicle-to-vehicle,V2V)
- 车与基础设施(vehicle-to-infrastructure,V2I)
- 车对外界的信息交换(vehicle-to-everything,V2X)